Vehicle Tracking and Classification System
Vehicle detection and classification information is invaluable in many transportation issues. Vehicle feature extraction and detection are the pre-processes required for vehicle classification. Current automatic vehicle classification systems have deficiencies: low accuracy, special requirements, fixed orientation of the camera, or additional hardware/devices. This report discusses a vehicle detection and classification system using model-based and fuzzy logic approaches. The system was tested using a variety of images captured by the highway traffic control center of the Utah Department of Transportation (UDOT). In comparison with existing systems, major advantages of the proposed system are: 1) no special orientation of the camera is required, 2) no additional devices are needed, 3) high classification accuracy is provided, 4) auto background generation, and 5) auto tracking and counting. Experimental results show that the performance of the proposed system exceeds that of the existing video-based vehicle classification systems.
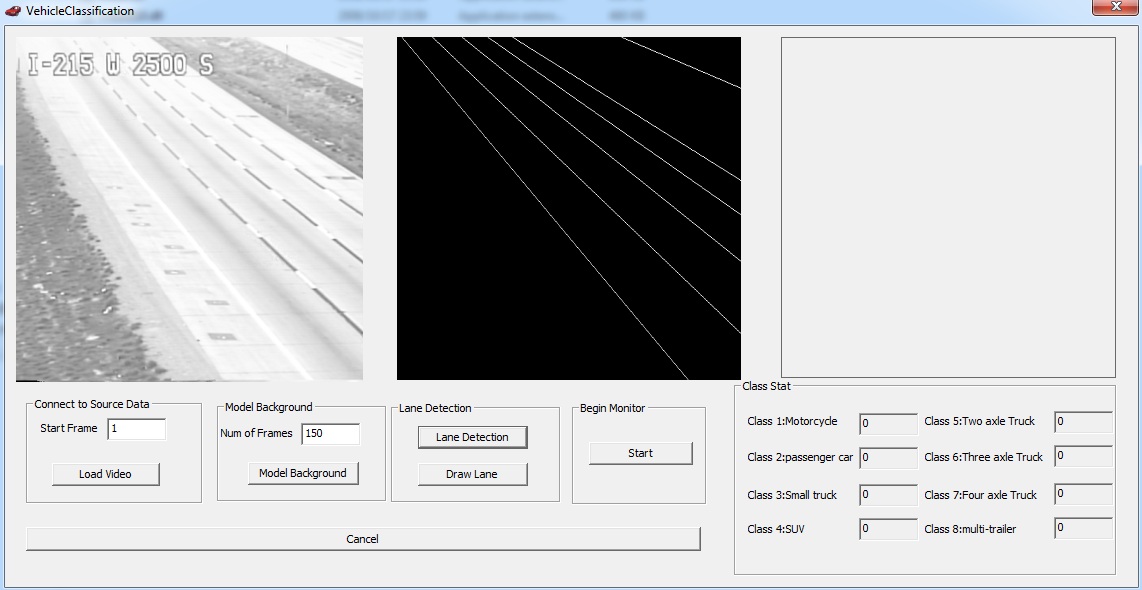
Auto Lane Detection
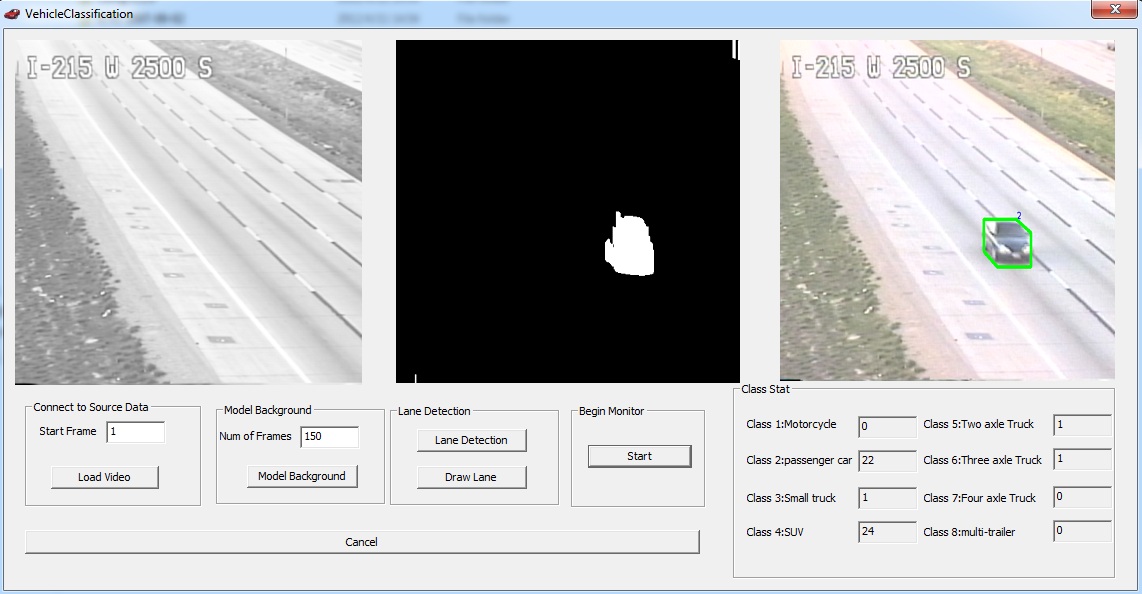
Auto Classification Stats Output
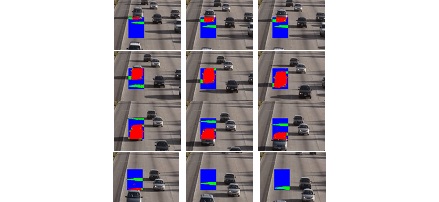
Shadow Analizing
For more information, please contact with Yuxuan Wang
Email: yuxuan.wang@aggiemail.usu.edu